

搭采埃孚8核CPU 體驗(yàn)“力帆”無(wú)人泊車
在過(guò)去30年,全球范圍內(nèi)汽車領(lǐng)域革命性的發(fā)展幾乎都是電子技術(shù)推動(dòng)的,無(wú)論是動(dòng)力系統(tǒng)、底盤(pán)控制,還是空調(diào)、車燈這些功能,在它們背后都有一塊“電腦”或者電子模塊,而處理器的計(jì)算能力就直接決定了它們的性能。電子化正在“吞噬”原本屬于機(jī)械工程領(lǐng)域的汽車行業(yè),主機(jī)廠和供應(yīng)商在大趨勢(shì)下謀劃著轉(zhuǎn)型,而IT公司順勢(shì)用觸角緊緊纏住了汽車行業(yè)。百度和采埃孚都是各自領(lǐng)域的巨頭,在2018年的第一個(gè)周末,倆家拿出了一個(gè)即將推給用戶的無(wú)人泊車技術(shù),你沒(méi)看錯(cuò),眼前這輛力帆就能做到。

這輛出自重慶工廠的力帆330EV不遠(yuǎn)萬(wàn)里通過(guò)海運(yùn)來(lái)到美國(guó)硅谷,為的就是能夠到這里的百度研究院學(xué)一項(xiàng)自動(dòng)駕駛的功夫,準(zhǔn)確的說(shuō)是無(wú)人泊車,這輛車要做到自己能在停車場(chǎng)找到空位并停進(jìn)去!技術(shù)理念上,這似乎遠(yuǎn)不及那些能夠在路上實(shí)現(xiàn)無(wú)人駕駛的測(cè)試車耀眼,但由于諸多因素的限制,幾乎所有關(guān)于無(wú)人駕駛的嘗試都無(wú)法應(yīng)用于日常真實(shí)的駕駛工況,所以,你現(xiàn)在能夠用到的包括特斯拉在內(nèi)的車型都屬于自動(dòng)駕駛輔助范疇,它還是需要駕駛員來(lái)監(jiān)控車輛以及道路狀況。




這輛力帆為什么要掌握無(wú)人泊車的技能?
事實(shí)上,這輛力帆330EV屬于盼達(dá)用車,這是國(guó)內(nèi)一家做分時(shí)租賃的公司,目前在7個(gè)城市可以用到盼達(dá)用車的分時(shí)租賃服務(wù)??瓷先ミ@家公司與那些以風(fēng)投為資本背景的初創(chuàng)公司沒(méi)什么差別,但其實(shí)在它的背后則是一家傳統(tǒng)車企——力帆,所以,用力帆的車來(lái)組建分時(shí)租賃業(yè)務(wù)就不奇怪了,而之所以用力帆330EV這款車,主要是從分時(shí)租賃的運(yùn)營(yíng)成本考慮,同樣行駛里程,電顯然要更便宜些,當(dāng)然,這里姑且先不考慮充電效率的問(wèn)題。

無(wú)人泊車的功能主要解決的是用戶在完成用車后的情景。在分時(shí)租賃的實(shí)際使用過(guò)程中,停車對(duì)于大多數(shù)人來(lái)說(shuō)都是件麻煩事,能不能讓用戶在抵達(dá)目的地后就把車停在停車場(chǎng)門(mén)口呢?

實(shí)現(xiàn)這個(gè)功能車輛需要幾個(gè)技術(shù)條件?
1、知道我在哪?
2、知道我要去哪?
3、知道路上有什么?
4、知道哪有停車位?
5、停進(jìn)去
我們先來(lái)說(shuō)第一個(gè)問(wèn)題——知道我在哪。這通過(guò)高清地圖和GPS定位就可以,百度自己有高清地圖的測(cè)繪資質(zhì)和能力(國(guó)內(nèi)另一個(gè)地圖供應(yīng)商高德也在積極的推動(dòng)高清地圖的數(shù)據(jù)積累),只要分時(shí)租賃所投放城市完成了高清地圖掃描即可。
去哪的問(wèn)題主要是基于地圖中停車場(chǎng)道路的路徑規(guī)劃來(lái)解決,這有點(diǎn)像導(dǎo)航從A點(diǎn)到B點(diǎn)的邏輯,車輛只要沿著道路線走就行。
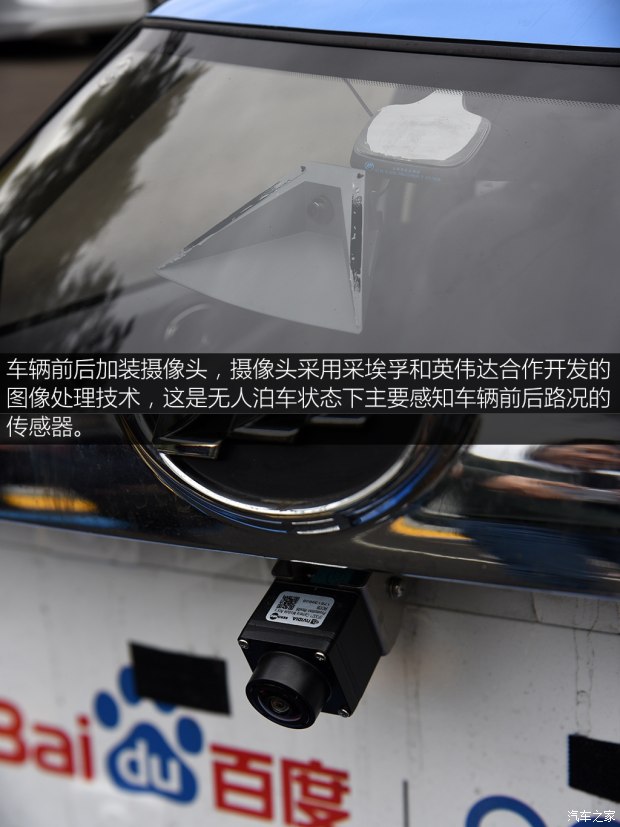
在尋找停車位的路上以及泊車的過(guò)程中,難免會(huì)遇到一些車輛或行人,如何能防止碰撞?這在我們此前做的一系列主動(dòng)安全測(cè)試中就能得到充分體現(xiàn),攝像頭和毫米波雷達(dá)是主流的傳感器類型,在無(wú)人泊車的應(yīng)用場(chǎng)景下,由于車速不會(huì)超過(guò)5km/h,道路場(chǎng)景也相對(duì)簡(jiǎn)單,所以,有一個(gè)用于圖像分析的攝像頭就夠用了。


找停車位和自動(dòng)泊車的功能就很簡(jiǎn)單了,它與現(xiàn)在得到普及的自動(dòng)泊車系統(tǒng)所需要的硬件相同,只要多裝幾個(gè)“倒車?yán)走_(dá)”能充分判斷車距就行了,通過(guò)距離的判斷識(shí)別出停車位,同時(shí),根據(jù)車位的間隔距離,電動(dòng)轉(zhuǎn)向助力可以進(jìn)行方向調(diào)整。最重要的是電動(dòng)車的擋位都是電動(dòng)的,所以前進(jìn)和后退也可以由電腦完成。如果是機(jī)械擋桿的車,原則上還要加一套電控機(jī)構(gòu),否則從硬件結(jié)構(gòu)上來(lái)說(shuō)是不具備實(shí)現(xiàn)無(wú)人泊車技術(shù)條件的。

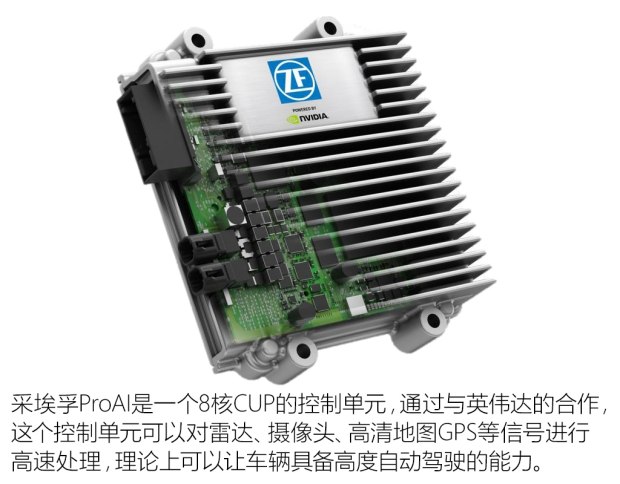
以上提到的僅僅是實(shí)現(xiàn)無(wú)人泊車的條件,如何把它們有效的連接起來(lái)是個(gè)關(guān)鍵,無(wú)論是攝像頭還是轉(zhuǎn)向系統(tǒng)又或者是制動(dòng)系統(tǒng),各個(gè)系統(tǒng)需要有一個(gè)大腦進(jìn)行管理,采埃孚最新的處理器ProAI提供了這樣的支持。
出自采埃孚的8核電腦
簡(jiǎn)單來(lái)說(shuō),采埃孚ProAI是一個(gè)8核CPU的電腦,由超過(guò)70億個(gè)半導(dǎo)體組成,我們?cè)诖饲暗奈恼抡f(shuō)過(guò),現(xiàn)在德國(guó)的半導(dǎo)體制造技術(shù)可以將其直徑控制在10納米,這比HIV病毒還要小十倍。它每秒可以計(jì)算30萬(wàn)次,盡管這遠(yuǎn)不及現(xiàn)有的超級(jí)計(jì)算水平,但考慮到期車載的應(yīng)用條件,僅30瓦的功耗平衡了計(jì)算能力與體積直接的關(guān)系。

在我看來(lái),此次采埃孚與百度、盼達(dá)用車聯(lián)合發(fā)布的無(wú)人泊車技術(shù)并不能代表ProAI處理器的能力,至于發(fā)揮出了多少功能,工程師暫時(shí)沒(méi)有給出答案,至少在整個(gè)系統(tǒng)架構(gòu)中,加裝6個(gè)毫米波雷達(dá)、雙目或三目攝像頭、高清地圖的GPS信號(hào),外加一組激光雷達(dá),這些傳感器平均每40毫秒更新一次,要知道我們眨一次眼睛的時(shí)間是200毫秒左右,也就是說(shuō),一次眨眼睛,傳感器已經(jīng)對(duì)周圍環(huán)境掃描了5次,所以,要實(shí)現(xiàn)真正意義上的自動(dòng)駕駛,哪怕是Level 4級(jí)別的程度,也是建立在龐大的數(shù)據(jù)交互和處理運(yùn)算之上的。而ProAI正是一個(gè)可以承載這一切的開(kāi)放架構(gòu),這樣的開(kāi)發(fā)理念和性能也與百度Apollo不謀而合,也正因如此,雙方在能以如此之快的速度拿出開(kāi)發(fā)成果(2017年秋天雙方簽署戰(zhàn)略協(xié)議,4個(gè)月后就拿出了無(wú)人代客泊車的成果)。

編輯總結(jié):
借助分時(shí)租賃的實(shí)際使用場(chǎng)景需求,推動(dòng)了無(wú)人泊車技術(shù)在實(shí)際用車中的應(yīng)用,對(duì)于盼達(dá)用車來(lái)說(shuō),這一技術(shù)的投入會(huì)提升用戶用車的體驗(yàn),另一方面,大量的實(shí)際應(yīng)用也是收集反饋的過(guò)程,畢竟無(wú)人泊車技術(shù)對(duì)任何一個(gè)汽車用戶都有著直接的意義,主機(jī)廠自然也希望能夠向旗下車型去普及。只不過(guò),現(xiàn)階段,大家的態(tài)度還都很保守?,F(xiàn)在各家公司都在以開(kāi)放的平臺(tái)來(lái)獲取發(fā)展的契機(jī),百度Apollo無(wú)疑是一個(gè)很好的平臺(tái),但龐大的算法更是需要強(qiáng)大的硬件作為后盾,而像采埃孚這種在機(jī)械、汽車行業(yè)里有近百年歷史的公司,他們更擅長(zhǎng)用硬件來(lái)解決問(wèn)題,與此同時(shí),讓自己的技術(shù)架構(gòu)對(duì)各種硬件更包容且更具兼容性,換句話說(shuō),無(wú)論你是采用圖像處理的技術(shù)方案,還是激光雷達(dá)的技術(shù)方案,又或者是綜合型的傳感體系,通過(guò)一個(gè)ProAI控制單元都能將繁雜的系統(tǒng)進(jìn)行歸一處理,而這正是傳統(tǒng)汽車供應(yīng)商的價(jià)值所在。
(以上內(nèi)容轉(zhuǎn)自@汽車之家 )

















